这里介绍一下利用槽型光电传感器提供高精度化原点位置的设置处理。
高精度的原点位置设置方法
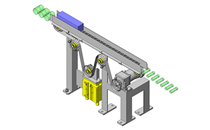
中央的光电传感器通过传感器发讯块的位置作为可移动体的原点(=旋转电机的旋转轴角度原点)、原点设定时传感器发讯块通过速度过大时、可移动体的惯性力即使接收到停止信号也会出现轻微过载导致原点位置的设定产生误差。
原点位置的设定在机械电源ON时和紧急停止处理后进行手动操作、需要注意因为操作时间短可移动物体在高速运转时需要进行移动原点的设定。
高精度原点位置的设定方法要理解原由、这个操作运用程序自动化节省时间。
原点位置设定时的误差产生原因 |
因此要实施高精度原点位置的设定、有必要在低速时通过传感器发讯块、下面的处理操作是为了这个操作在短时间内处理此项任务
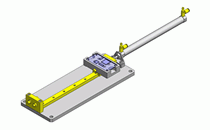
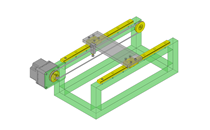
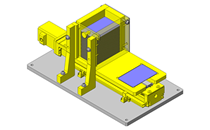
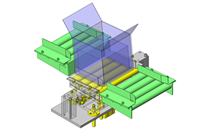
高精度的原点位置的处理(参考【图】)
1.传感器发讯块在一定程度高速运行时从单侧通过原点传感器后立即停止
2.1的状态下、在低速运行时逆方向传感器发讯块移动到达原点传感器OFF状态
3.这个OFF状态的位置作为原点
■ 目的
1.的操作在短时间内传感器发讯块返回光电传感器位置
2.的操作传感器在低速时可检测出传感器发讯块位置但不检测误差
以上程序标准化后排除人员操作的偏差
下回介绍旋转体的原点位置设定。
")